Note
It is recommended to start with the tutorial on how to build a map.
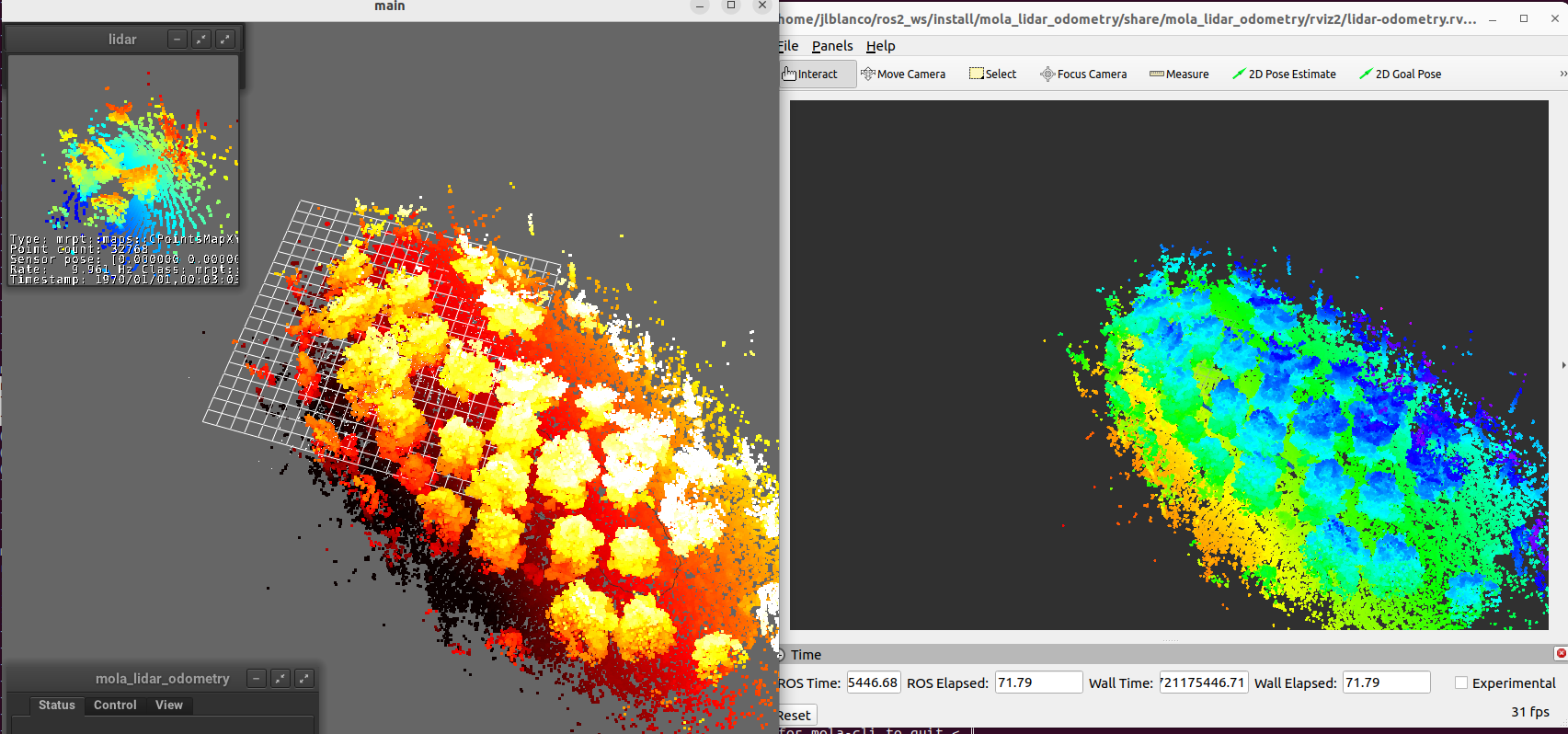
This launch file (view sources) runs MOLA-LO live on point clouds received from a ROS 2 topic, demonstrating a few features:
Launching and visualizing LO in both,
mola_vizandRViz2(or use FoxGlove if preferred).How MOLA
mola_lidar_odometrypublishes the local map, the estimated trajectory, and /tf for the estimated odometry.